Projects
A collection of my research and engineering work.

PIP-Loco: A Quadrupedal Robot Locomotion Framework
A deep dive into training blind locomotion for a robot dog using model-based Reinforcement Learning and Model Predictive Control (Genesis Implementation for Unitree Go2).
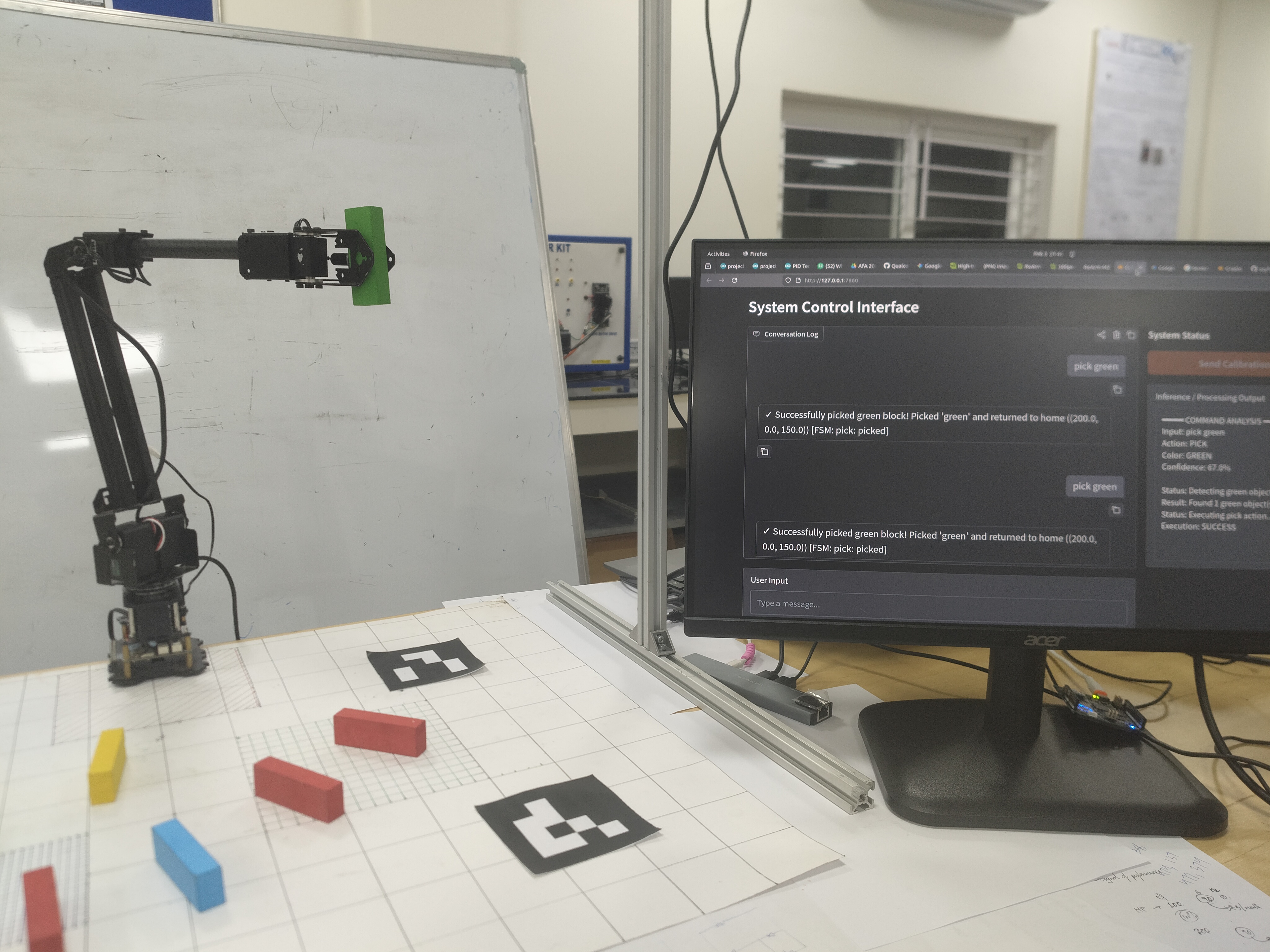
The Semantic Manipulator
Natural language-controlled robotic manipulation of colored blocks using monocular vision, lightweight semantic parsing, and finite state machine grounding.
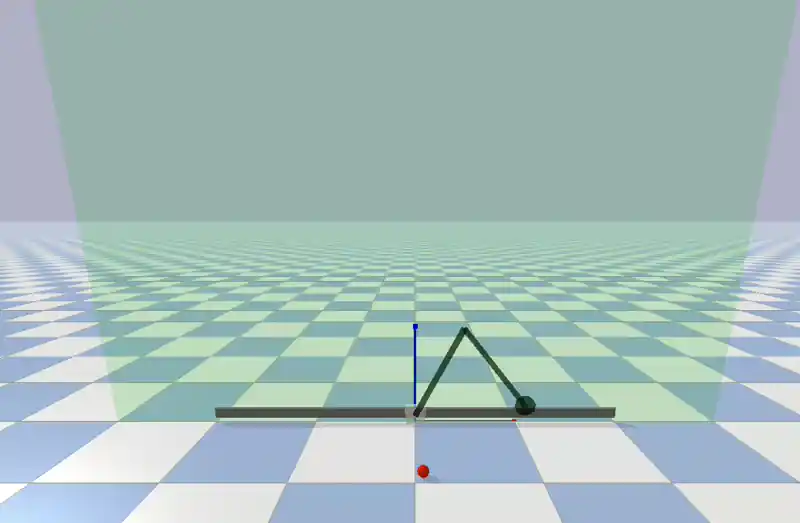
Real-Time Projectile Interception
Real-time interception of 3D ballistic projectiles using a planar 3-DOF arm and Fixed-Time MPC.

Beetle: Autonomous Testbed
A robust, 4-wheeled skid-steer autonomous ground vehicle (AGV) designed as a research testbed.